
Programación de Beckhoff TwinCAT 3: Una guía práctica para ingenieros que migran desde PLC tradicionales.
Un ingeniero que pasó diez años programando lógica de escalera en plataformas Allen Bradley y Siemens abre TwinCAT 3 por primera vez y se queda perplejo. El árbol del proyecto se encuentra dentro de Visual Studio. Los archivos C++ comparten espacio con el código del PLC. No hay ranuras de chasis que configurar ni catálogo de hardware que consultar. El núcleo en tiempo real se instala como un controlador de Windows junto con el navegador web. Así es la programación de Beckhoff TwinCAT 3: un enfoque de control industrial centrado en el software. La transición es compleja, pero la recompensa es una plataforma con capacidades que ningún PLC tradicional puede igualar.
TwinCAT 3 (Tecnología de Control y Automatización para Windows) convierte cualquier PC con Windows en un PLC y controlador de movimiento en tiempo real. A diferencia de las plataformas tradicionales, donde el entorno de ejecución reside en hardware propietario, TwinCAT 3 aísla los núcleos de CPU dedicados de Windows mediante un controlador de kernel en tiempo real: programación directa sobre el hardware, no virtualización.
El entorno de ingeniería, TwinCAT 3 XAE, se integra en Microsoft Visual Studio como una extensión de shell. El proyecto PLC se ejecuta dentro de una solución .sln estándar. El control de versiones funciona mediante Git. Varios programadores pueden trabajar simultáneamente. Para los ingenieros acostumbrados a Studio 5000 o TIA Portal, el IDE se siente como un entorno de desarrollo de software, porque, de hecho, lo es.
La arquitectura se desmarca completamente del estándar IEC 61131-3. Los módulos de C++ y MATLAB/Simulink se compilan como tareas nativas en tiempo real junto con el código del PLC, compartiendo memoria directamente a través de TcCOM (TwinCAT Component Object Model). El bus de campo es EtherCAT, el protocolo determinista de Beckhoff que conecta en cadena miles de terminales de E/S en un solo cable con tiempos de ciclo inferiores al milisegundo. No se requiere la nomenclatura de dispositivos PROFINET, ni archivos GSDML, ni herramientas de configuración de variadores de terceros.
El conjunto de software incluye: TwinCAT 3 XAE (ingeniería), TwinCAT 3 XAR (ejecución en tiempo real) y el núcleo en tiempo real. El desarrollo es gratuito. Puedes escribir, compilar y simular programas completos para máquinas en un portátil común sin necesidad de hardware Beckhoff.
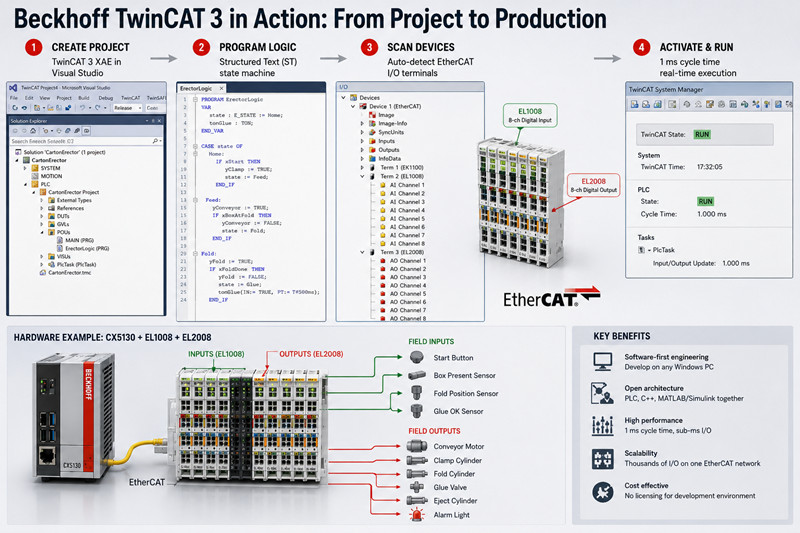
Un integrador de embalajes en Jeddah implementó un sistema de control para una máquina formadora de cajas utilizando una PC integrada CX5130, entradas digitales de 8 canales EL1008 y salidas digitales de 8 canales EL2008. Todo el proyecto, desde la instalación hasta la configuración de las salidas, se completó en una tarde.
Paso 1: Instale TwinCAT 3 XAE. Descárguelo desde el sitio web de Beckhoff. El instalador agrega una barra de herramientas de TwinCAT a Visual Studio e instala el controlador del kernel en tiempo real. Es compatible con las versiones 2017, 2019 y 2022 de Visual Studio.
Paso 2: Crear un proyecto. Archivo → Nuevo → Proyecto → "Proyecto TwinCAT". La solución incluye un nodo PLC, un nodo SYSTEM para configuración en tiempo real y un nodo de E/S para dispositivos EtherCAT. Se recomienda la arquitectura x86 para PC integradas como la CX5130 y la arquitectura x64 para PC integradas más recientes.
Paso 3: Elija el lenguaje de programación. Haga clic con el botón derecho en el nodo PLC y agregue un proyecto PLC. Beckhoff utiliza por defecto el texto estructurado (ST), y la mayoría de los programadores lo utilizan porque ST maneja matrices, máquinas de estados y lógica compleja de forma mucho más clara que la lógica de escalera. Sin embargo, el diagrama de función continua (CFC), un lenguaje gráfico de formato libre donde se colocan bloques en un lienzo y se dibujan cables de señal, es especialmente adecuado para bucles de control de procesos. La lógica de escalera (LD) sigue estando disponible para enclavamientos discretos que los equipos de mantenimiento necesitan para solucionar problemas.
Para la máquina formadora de cajas, el ingeniero programó una máquina de estados en ST con estados para Inicio, Alimentación, Plegado, Pegado y Expulsión. Cada estado asignaba salidas al EL2008 y leía entradas del EL1008.
Paso 4: Escanee los dispositivos EtherCAT. Haga clic con el botón derecho en "Dispositivos" en el árbol de E/S y seleccione "Escanear". TwinCAT 3 detecta automáticamente todos los terminales, variadores y segmentos de E/S conectados. EL1008 aparece como un terminal de entrada de 8 canales. EL2008 aparece como una salida de 8 canales. Vincule los canales de los terminales a las variables del PLC arrastrándolos a la declaración de variables.
Paso 5: Activar la configuración. Haga clic en "Activar configuración" en la barra de herramientas. TwinCAT 3 compila el código del PLC, crea la configuración en tiempo real y carga todo en el entorno de ejecución. Pulse "Iniciar sesión", seleccione "Modo de ejecución" y el CX5130 ejecutará la lógica del PLC con el tiempo de ciclo configurado, normalmente 1 ms.
El único inconveniente fue que el portátil no podía conectarse al CX5130 porque la red AMS NetID no estaba configurada. Añadir la red NetID del portátil mediante la herramienta de enrutamiento TwinCAT (icono en la barra de tareas) solucionó el problema en menos de dos minutos.
La característica que distingue a TwinCAT 3 de cualquier plataforma PLC tradicional: C++ nativo. Simplemente agregas un módulo C++ directamente al proyecto en tiempo real, escribes código C++ estándar con extensiones para tiempo real y se ejecuta como un objeto TcCOM en el mismo núcleo aislado que el PLC, compartiendo memoria a través de punteros sin latencia adicional.
Un fabricante alemán de envases utilizó este sistema para realizar una inspección de tapones de botellas basada en OpenCV a 400 ppm. El módulo de visión C++ intercambia los resultados de aprobado/reprobado con la máquina de estados del PLC mediante una estructura compartida. Un enfoque tradicional —comunicación entre procesos externa a través de OPC UA— añadiría entre 10 y 50 ms de latencia y requeriría el mantenimiento de un enlace de red adicional.
El dispositivo TE1400 exporta modelos de Simulink como módulos TcCOM. Un ingeniero de procesos diseña una cascada PID, hace clic en "Generar código" y el modelo se compila en un objeto en tiempo real en el proyecto TwinCAT 3. El programador del PLC asigna las entradas y salidas del modelo a terminales de E/S reales. Una planta de tratamiento de agua de los Emiratos Árabes Unidos utilizó este sistema para un algoritmo de dosificación por coagulación: sensores de turbidez y pH conectados a entradas analógicas EL3024, y la salida del modelo controlando las salidas analógicas EL4024 hacia las bombas dosificadoras. Integración total: un día.
NC PTP gestiona el posicionamiento estándar punto a punto con perfiles trapezoidales o en forma de S: transportadores, actuadores lineales y posicionamiento rotativo. TwinCAT CNC es un núcleo de control numérico completo que admite código G, cinemática de 5 ejes, compensación del radio de la herramienta y anticipación. Un taller CNC italiano realiza mecanizado de 5 ejes en TwinCAT CNC con servomotores AX5000 con ciclos de interpolación de 0,1 ms.
La interfaz HMI TwinCAT (TE2000) ofrece paneles de control HTML5/JavaScript desde el IPC de Beckhoff. Cualquier dispositivo con navegador (PC de panel, tableta, teléfono inteligente) muestra las mismas pantallas. La comunicación entre el servidor HMI y el PLC utiliza ADS a través del enrutador AMS local con una latencia inferior a un milisegundo. No se requiere hardware de panel propietario.
TwinCAT 3 asigna tareas individuales a núcleos aislados específicos con la preempción desactivada. Una configuración típica de cuatro núcleos CX2040: el núcleo 1 ejecuta la máquina de estados del PLC a 1 ms, el núcleo 2 ejecuta NC PTP a 0,5 ms, el núcleo 3 ejecuta un módulo de visión C++ a 5 ms y el núcleo 0 gestiona Windows. Si alguna tarea en tiempo real excede su ciclo, TwinCAT informa de una infracción y entra en un estado de error configurable. Para el empaquetado de alta velocidad o los interpoladores CNC, el aislamiento manual de los núcleos elimina la fluctuación que desestabilizaría la máquina.
Las licencias de TwinCAT 3 se compran una sola vez por dispositivo. TC1200 (solo PLC, IEC 61131-3) cuesta aproximadamente $700 para un CX5130. TC1250 añade la función de movimiento NC PTP. TC1300 habilita C++. El paquete completo para un CX2040 cuesta entre $3000 y $4000. El entorno de ingeniería es gratuito para desarrollo y simulación.
PCs integrados: CX7000 (aproximadamente $400 para modelos básicos), serie CX2000 ($1500-$4000), IPC ultracompacto C6030 ($2000+). Los terminales de E/S como EL1008 y EL2008 cuestan entre $80 y $120 por módulo. El plazo de entrega estándar del catálogo es de 1 a 3 semanas.
Explore los PC integrados, los terminales EtherCAT y las soluciones de licencias y PLC de Beckhoff en tztechio.com.
P: ¿Puedo ejecutar TwinCAT 3 en un portátil normal para desarrollo?
Sí. TwinCAT 3 XAE se instala en cualquier máquina Windows 10/11 x64. El núcleo en tiempo real se ejecuta en modo local mediante la programación aislada de la CPU. Puede escribir, compilar y simular programas completos de PLC, C++ y control de movimiento sin necesidad de hardware Beckhoff. Para la simulación de E/S, escriba una rutina ST corta que genere la retroalimentación del sensor. Para el control de movimiento, habilite el modo de simulación de ejes en la configuración del SISTEMA.
P: ¿Es TwinCAT 3 más difícil de aprender que Studio 5000 o TIA Portal?
El entorno de Visual Studio requiere un periodo de aprendizaje si solo se han utilizado IDEs específicos para PLC. Sin embargo, el flujo de trabajo de escaneo de E/S es más sencillo que el catálogo de hardware de TIA Portal, y los ingenieros familiarizados con texto estructurado y prácticas básicas de software (control de versiones, depuración, ámbito de variables) suelen encontrar TwinCAT 3 intuitivo durante la primera semana. La ayuda F1 de Beckhoff es completa y contextual.
P: ¿Necesito un IPC de Beckhoff o puedo usar un PC de terceros?
El entorno de ejecución funciona en cualquier PC con Windows x86, pero Beckhoff solo valida el comportamiento en tiempo real en su propio hardware. Los PC de terceros presentan riesgo de fluctuaciones debido a problemas con el chipset, la administración de energía de la BIOS o los controladores. Desarrolle y simule en cualquier portátil. Para producción, utilice los IPC de Beckhoff: la diferencia de coste es insignificante en comparación con la depuración de hardware no validado.
P: ¿Puedo combinar lógica de escalera y texto estructurado en el mismo proyecto?
Sí. Un único proyecto de PLC puede contener PRG, FB y FC en cualquier combinación de ST, LD, FBD y CFC. Una rutina de escalera puede llamar a un bloque de función ST. Un diagrama CFC puede hacer referencia a redes de escalera. La compilación y el enlace son independientes del lenguaje.
P: ¿TwinCAT 3 es compatible con OPC UA y MQTT para la Industria 4.0?
Sí. El TF6100 proporciona funcionalidad de servidor OPC UA, exponiendo los símbolos del PLC como nodos configurables. El TF6701 añade la función de publicación/suscripción MQTT. Ambos se ejecutan como módulos TcCOM en tiempo real, independientemente de los servicios de Windows.
P: ¿Cómo se gestionan las actualizaciones de firmware y software en un equipo en funcionamiento?
TwinCAT 3 admite cambios en línea: permite modificar el código del PLC, añadir variables y ajustar la configuración de tareas mientras el entorno de ejecución permanece en modo de ejecución. Los cambios estructurales (nuevos dispositivos EtherCAT, modificaciones del tiempo de ciclo, módulos C++) requieren una "Activación de configuración" con un breve reinicio controlado. Para procesos 24/7, se encuentran disponibles configuraciones redundantes de TwinCAT con conmutación por error automática.

Continúe leyendo, manténgase informado, suscríbase y le invitamos a que nos cuente lo que piensa.



Además, con su permiso, queremos colocar cookies para que su visita y su interacción con slOC sean más personales. Para ello utilizamos cookies analíticas y publicitarias. Con estas cookies, nosotros y terceros podemos rastrear y recopilar su comportamiento en Internet dentro y fuera de super-instrument.com. Con esto, nosotros y terceros adaptamos super-instrument.com y los anuncios a su interés. Al hacer clic en Aceptar, acepta esto. Si lo rechaza, solo utilizamos las cookies necesarias y lamentablemente no recibirá ningún contenido personalizado. Visite nuestra política de cookies para obtener más información o para cambiar su consentimiento en el futuro.
Accept and continue Decline cookies












